La robotique connait des avancées spectaculaires dans de nombreux domaines où elle remplace l’homme par la machine. En chirurgie, la complexité des gestes les rend difficilement transposables en formules mathématiques à l’usage d’un robot. Pour autant la chirurgie orthopédique peut bénéficier des qualités de la robotique, à savoir la précision des calculs avant et pendant la chirurgie, la dextérité et la reproductibilité des gestes techniques de la machine, qualités qui permettent d’espérer améliorer encore les résultats de la chirurgie prothétique pour le bénéfice du patient. Rassurez vous, le robot ne travaille pas tout seul, il est contrôlé en permanence par le chirurgien qui le manipule et prend toutes les décisions lors des trois étapes de la chirurgie détaillées ci-dessous.

LA PLANIFICATION AVANT L’OPERATION
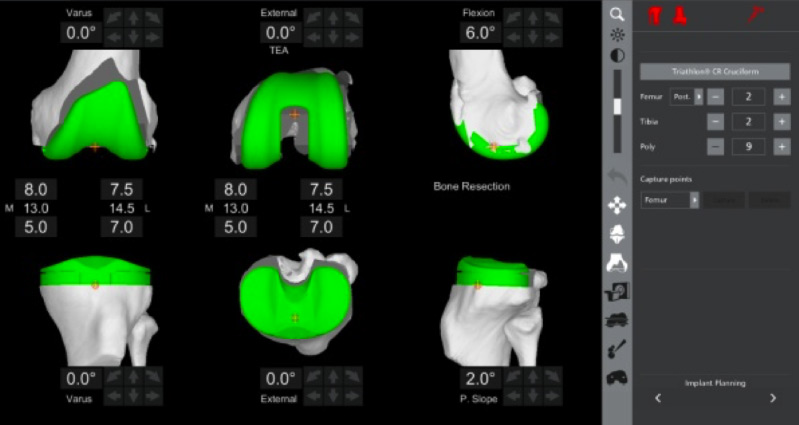
Une fois que la décision de poser une prothèse de genou a été prise lors de la consultation avec le chirurgien, une reconstruction en trois dimensions du genou est réalisée à partir d’un scanner. Cela va permettre de prévoir quelle prothèse va le mieux s’adapter au genou en taille, en orientation dans les trois plans de l’espace, et quelle quantité d’os sera enlevée pour glisser la prothèse. Cette planification est étudiée par le chirurgien avant l’opération.
LES AJUSTEMENTS PENDANT L’OPERATION
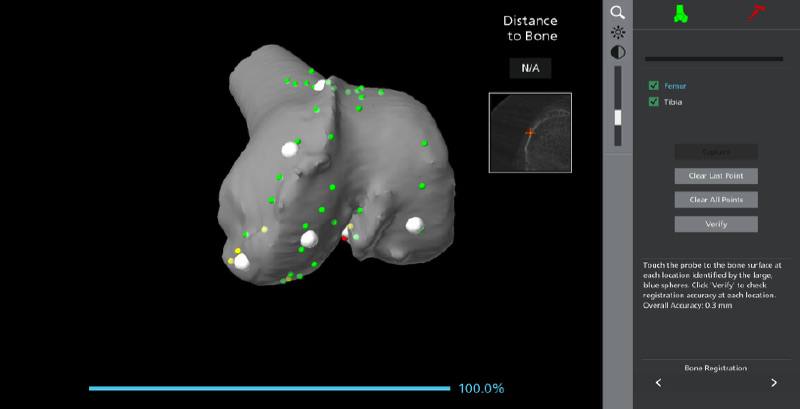
Pendant l’opération, des points de repère sont pris sur les surfaces osseuses, ce qui permet de faire correspondre en permanence le scanner avec l’articulation opérée. Le chirurgien va alors pouvoir visualiser le résultat des coupes osseuses sur le fonctionnement ultérieur du genou, avant la réalisation des coupes.
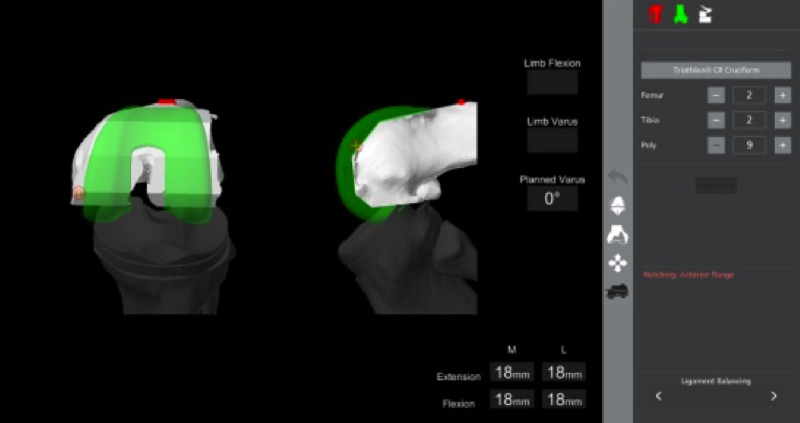
On peut à ce moment là les modifier dans les trois plans de l’espace, en hauteur, en orientation, en rotation de façon à obtenir un équilibrage ligamentaire parfait entre 0° et 90° de flexion, ce qui assurera une stabilité optimale (escaliers, marche en terrain accidenté, danse, ski, surf etc..). Une fois cet équilibrage obtenu, les modifications sont enregistrées dans le robot qui va réaliser les coupes osseuses.
LE TRAVAIL DU BRAS ROBOTISÉ
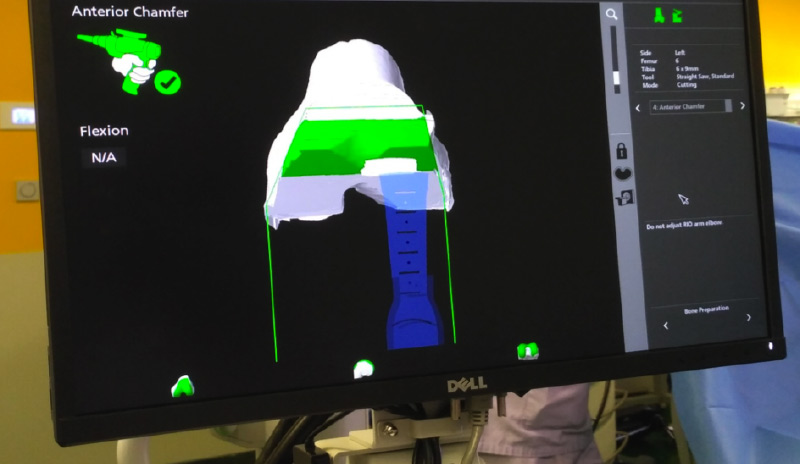
Les coupes, extrêmement régulières, sont réalisées et contrôlées par le bras robotisé qui se recale en permanence sur le modèle 3D du patient, ce qui permet d’interdire la pénétration de l’instrument dans une zone dangereuse. On définit, avant l’opération, une zone géométrique dans laquelle le chirurgien peut évoluer sans danger, et pour une prothèse de genou cela correspond au volume osseux à enlever. Ainsi sont totalement protégés tous les éléments entourant l’os, ce qui apporte une sécurité maximale au geste chirurgical. Le robot ne fonctionne que si le chirurgien appuie sur la gâchette de la scie ou de la fraise, mais par contre refusera toujours de fonctionner en dehors de la zone définie, ce qui est une sécurité absolue.



